
enPiT2 Emb スプリングスクール2019を開催しました!(開催地:九州大学&東海大学)

目的:
実践的な組込みシステムを、プロジェクトで取り組み開発できる人材を育成すること。
- PBL課題に取り組み、enPiTのQuadProの基礎的な能力を高める。
- 組込みシステム開発の基礎を、モデル設計やロボット制御システムの開発を通して学ぶ。
※後援:情報処理学会組込みシステム研究会
8月22日、23日に開催予定の組込みシステムシンポジウム特別企画「ESSロボットチャレンジ2019」に参加予定者のキックオフも兼ねる。
日時:
2019年5月11日(土) 、12日(日)、15日(水)、18日(土)
開催地:
@福岡・・・九州大学 伊都キャンパス ウエスト2号館5階506号室
@東京・・・東海大学 高輪キャンパス2号館2階2201, 2202教室
参加者数:
8校より、受講生101名 (修士2年4名、修士1年40名、学部4年生51名、学部3年生:6名)が参加し、24チームに分かれてミニ分散PBLを実施した。
講義
スケジュール
講義の様子
【5月11日(土)】午前の松浦先生によるプロジェクトマネジメントの講義の後、学生はenPiT1とenPiT2のカリキュラムに分かれて受講した。enPiT1カリキュラムでは、Telloを演習で使うための基礎技術に関する講義を大江先生が担当し、三輪先生がロボット制御理論について講義し、久住先生が組込みシステムのモデルベースのモジュール設計・開発について講義した。enPiT2カリキュラムでは、Zumo制御に必要なライブラリ関数を使った基礎技術に関する講義を佐藤先生が担当し、渡辺先生が学部生向けにデータフローダイアグラムを用いたモジュール設計の基礎、リアルタイムプログラミングなどについて講義した。
【5月12日(日)】午前のセッションでは、前日に引き続きenPiT1とenPiT2のカリキュラムに分かれ、enPiT1カリキュラムでは、久住先生がモジュール設計の講義を演習を交えて行い、enPiT2カリキュラムでは、元木先生がロボット制御入門の講義を行った。特にenPiT2のカリキュラムは、初日にロボットの使い方、設計方法など基礎を学んだ後に、難易度をあげてロボット制御方法について学ぶという構成をとることで、学生達が飽きることなくロボット開発に取り組めるようにしている。プロジェクトマネジメントの講義を初めて受ける学生も多いため、午後のセッションでは、渡辺先生がScrum演習とPBLの進め方について講義し、その後、他大学の学生とグループを組んでミニ分散PBLの課題に2時間取り組み、Scrumの講義で教わったプロダクトバックログ、スプリントバックログ、スプリントレトロスペクティブに基づいたタスク管理を演習した。
ミニ分散PBL
【5月13日(月)~17日(金)】チームごとにミニ分散PBLを実践しながら下記の課題に取り組んだ。5月15日には、それぞれのグループの拠点大学をインターネットで接続し、進捗報告会を実施した。また、Facebookを立ち上げて、学生からの技術的な質問に教員が答えられる様にした。
<教材説明>
enPiT1カリキュラムの教材
・Tello (Ryze Technologys製ドローン)
・主な仕様:重量: 80 g (プロペラx4, バッテリ含む)、搭載機能: 距離計、気圧計、LED、ビジョンシステム、 2.4 GHz 802.11 n Wi-Fi、720 p カメラ、マイクロUSBポート(充電用)
enPiT2カリキュラムの教材
・Zumo (無限軌道(キャタピラ)式ロボット)
・主な仕様:アクチュエータ(モータドライバ、ブザー、LED)、センサ(3軸加速度・磁気センサ、3軸ジャイロセンサ、ライントレースサンサ)

<課題説明>
enPiT1カリキュラムのPBL課題
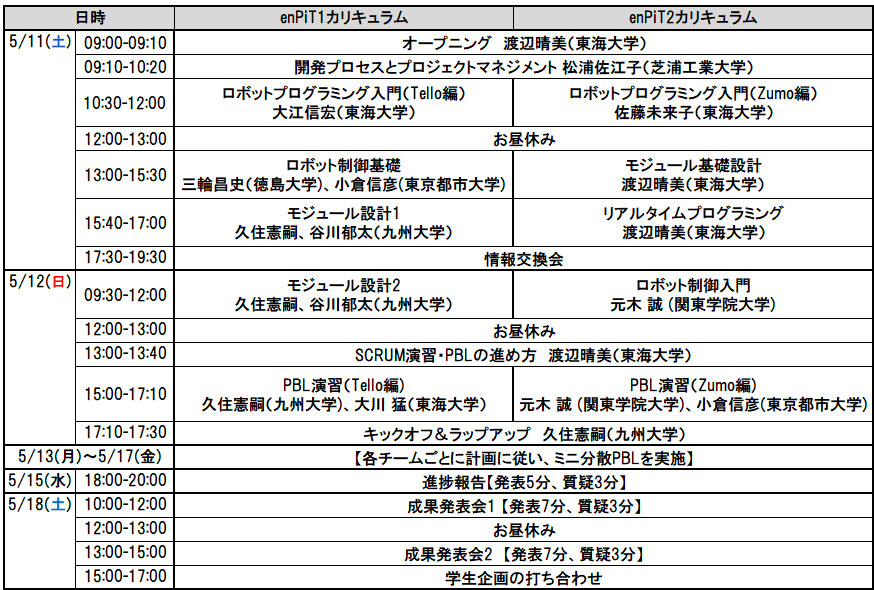
・今回のTelloのミッションは、現存する遺跡をカメラで調べ、破損個所を報告すること
・課題概要
(1)Telloをスタート地点から調査エリアまで飛行させる
(2)調査エリアまで来たら破損個所を調べる
(3)開始地点まで飛行して戻る
enPiT2カリキュラムのPBL課題
・運転者は様々な状況を判断し、出発地点から目的地点まで自動車を運転する。自動運転では、コンピュータが運転者と同様に、様々な状況を判断し、出発地点から目的地点まで到達しなければならない。分散PBLでは、自動運転に必要な基礎的な要素に取り組む。
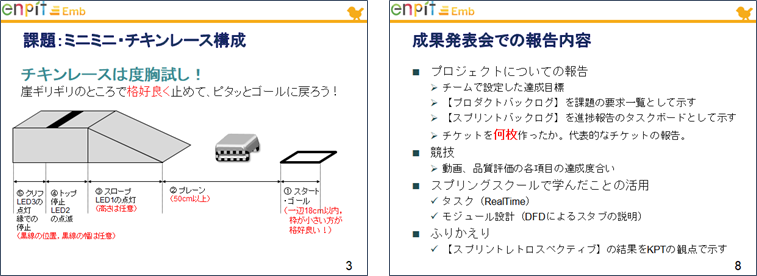
・課題:ミニミニ・チキンレース
(1)①スタートエリアから出発し、②プレーンエリア、③スロープエリアを通り、④トップエリア、⑤クリフエリアに到達する。③スロープエリア、④トップエリア、⑤クリフエリアで下記の課題を実施する。
(2)スロープエリア: LED1を点滅させる(チカチカさせない)。
(3)トップエリア:スロープエリアを通り過ぎたら、直ちにに停止し、LED1を消灯し、LED2を3秒間点滅(チカ近させる)させ、LEDを消灯し出発。
(4)クリフエリア:クリフエリアに到達したら、LED3を点灯(黒線上で停止の必要はない)しながら走行。崖ギリギリで停止する。
(5)クリフエリアで上記を実施したら、①ゴールエリアにバックで戻る。
成果発表会
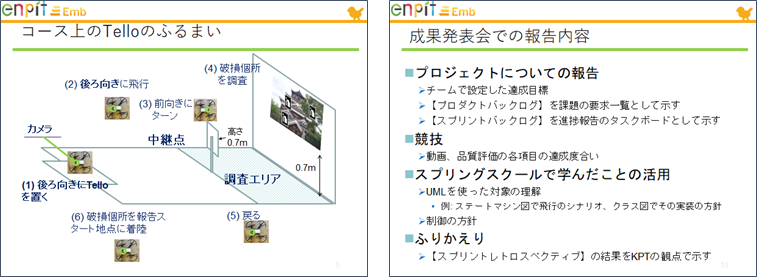
【5月18日(土)】ミニ分散PBLを実施して課題に取り組んだ成果をグループごとに発表しました。それぞれのグループの拠点大学をインターネットで接続して、発表7分、質疑3分で実施しました。enPiT1が11チーム、enPiT2が13チームでPBLの成果を発表しました。
スプリングスクール2019を終えて
本年度のスプリングスクール2019では、モジュール設計やリアルタイムプログラミングの講義を充実させて、ミニ分散PBLの際に実施するように促しました。また、ロボット制御の講義も、具体的にPBL課題の対象であるロボットの挙動を計測する演習を講義の中に含めるようにしました。特に、enPiT2のミニ分散PBLの発表からは、次のような傾向を得ることができました。
①計測を十分に行いそれに基づく制御の重要性の認識
課題の坂道における加速度センサのデータを計測した結果を各グループが成果として発表していました。計測を義務付けることにより、どのチームもロボット制御において、平坦路の走行と坂の走行との状態遷移がクリアできてたようでした。
②モジュール設計の重要性と設計法の理解
どのチームもDFDを使ったモジュール設計を行っており,DFDを用いるメリットがグループ開発で大いに感じられたとの感想が振り返りシートにも記載されていました。スタブ開発もグループ開発をしたからこそ、より必要性を感じたという感想がありました。
③組込みシステム特有の並行動作の理解と実装
完全にリアルタイム設計やタスク分割の設計まではできなかったという結果が多かったのですが、今後学びたいことの目標として挙げている学生も多く、夏のPBL実践では講義の成果が期待できると思っています。
昨年度に比べて、モジュール設計を発表会のプレゼンテーションに含めているチームが多く、本年度は成果発表におけるプレゼンテーションに含める内容を明確に指示した効果があったと考えます。また、enPiTに初めて参加する学部生にとっては消化しきれないほどの密度の濃い講義となりましたが、修士の学生のプロジェクトマネージメントやモデル設計の発表を聞くことで、学びの大切さ、設計の重要性、タスク管理・コミュニケーションの必要性などが十分に実感できたのではないかと思います。まだクリアできていない課題に対しても、共有している講義資料を参考にして、最後まで取り組んでほしいと思います。そして夏の「ESSロボットチャレンジ2019」の課題にぜひチャレンジして、また新しい学びや気づきにつなげてほしいと考えています。
