参加組織募集:協調型自動運転のための情報通信プラットフォーム共通化コンソーシアム
自動運転では,これまでドライバが行っていた認知,判断,操作をコンピュータが行います.多様な走行環境に対応するために,現在,End-to-End AI(ルールベースの併用も含めて)へトレンドが移りつつあります.人間の視覚を車載センサで代替しコンピュータ制御することで,人間による判断や操作の誤りを軽減できる可能性が期待できますが,高度なAIであっても車載センサで検知できない死角の情報はどうやっても認識できないため,人間と比較して大幅な安全性や効率性の向上は困難となります.この課題を解決するためには,路車協調や車々協調が必要になると考えられます.車載センサに加えて,周囲のセンサを利用することで広範囲を監視し,より円滑な走行を実現できます.自律型自動運転技術では,世界的に米国や中国が先行していると言われており,この状況を巻き返すためには,日本が得意とするインフラ協調などの通信技術を利用した新たな協調型自動運転モデルを構築していくことが1つの方向です.
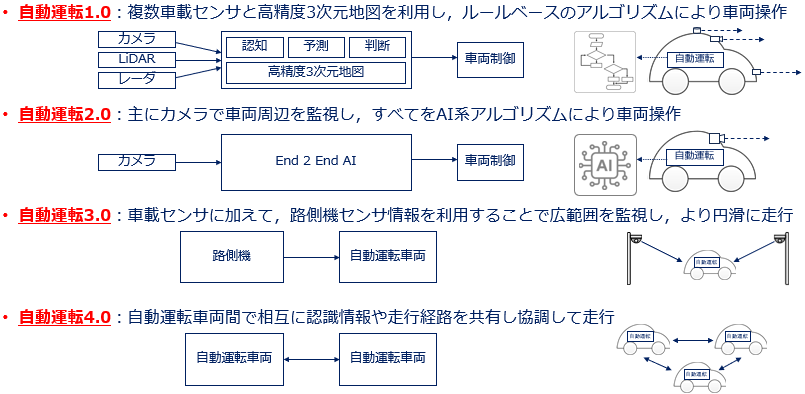
図 1 自動運転と協調
現在,日本では自動運転の実用化に向けて各地で実証実験が行われており,その中にはインフラ協調もありますが,その通信仕様は共通化されておらず互換性や拡張性がないため,このまま普及が進むと各車両には複数の種類の通信システムの搭載が求められます.一方で世界的には,ISOにおいて協調型自動運転に向けた協調ITS通信アーキテクチャが標準化されており,欧米ではこの仕様をもとに協調型自動運転に向けたシステムの相互接続テストや実証実験が実施されています.日本においてはITSのための無線通信の周波数(5.9GHz帯)を新たに確保する動きが進んでおり,これを機に,この広帯域の通信をもとにした信頼性確保や高性能データ処理,セキュリティ確保のための技術を取り入れた協調型自動運転のための情報通信プラットフォームの共通仕様の策定,および,リファレンスとなるソフトウェアの開発が必要です.
これまで名古屋大学・同志社大学では複数の企業と共同で協調型自動運転向けの情報通信プラットフォーム(DM2.0)を開発してきました.このDM2.0は,ISOの国際標準であるITSステーションアーキテクチャ(ISO 21217)に準拠するかたちで構成し,公開鍵基盤(PKI)を利用したセキュリティ確保の仕組みも組み込み,RoAD to the L4テーマ4をはじめ複数の実証実験を通して検証を行ってきました.このプラットフォームをオープンソース化しリファレンスとして利用し,さらなる信頼性と効率化向上の仕組みやアプリケーションの開発,相互接続テストなどを実施していくための企業コンソーシアムを新たに設立します.
- アーキテクチャ:国際標準であるITSステーションアーキテクチャに準拠した階層化されたモジュール構成で,PKIを利用したセキュリティ確保, APIを定めたアプリケーション開発の効率化,ITS無線/C-V2Xや携帯電話網といった通信方式の切り替えや併用が可能となっています.
- 高速データ処理:通常の関係データベースではなく,センサデータ処理向けのストリーム型データベースを採用し,地図データと併せた高速データ処理が可能となっています.また,クラウド/エッジ/車載機の3層構成による分散処理によりスケーラビリティの確保を実現します.移動経路の予測に基づいた証明書取得によるセキュリティ確保の高速化について検討します.
- 高信頼通信:C-V2Xのブロードキャスト通信,複数キャリアの携帯電話網(ユニキャスト通信)を状況に応じて組み合わせて利用することで,通信の高信頼性と低遅延化を行います.位置情報を基盤にしたNR-V2Xユニキャスト・グループキャストの特徴を活かした方式の導入を検討します.
- アプリケーション:複数の路側機(LiDAR,カメラ等)の検知情報を融合することで認識精度を向上させるためのアルゴリズムを導入しています.車載機のセンサも含めた検知範囲拡大に加えて,物標がない空間(フリースペース)の概念を導入することで,精度・信頼度の向上を目指します.
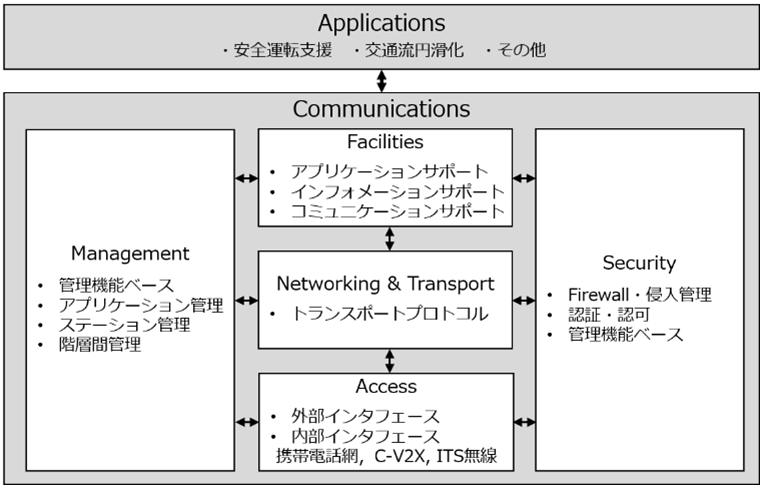
図 2 ITSステーションアーキテクチャ(ISO 21217)
協調型自動運転向け情報通信プラットフォームの開発,発展のために,複数の企業や団体,研究機関の参加による新コンソーシアムを設立し,技術者を確保し,共通化の基盤となるリファレンス・ソフトウエアをオープンソース化し,相互接続テストを通して普及に努めることを目的とします.
- コンソーシアム名称:
- 和名「協調型自動運転のための情報通信プラットフォーム共通化コンソーシアム」
- 英名「The Research Consortium on Commonalization of Information Communication Platforms for Cooperative Automated Vehicles」
- 略称「CAV-DM2コンソ」
- コンソ活動期間: 2026年4月1日~2029年3月31日(合計3年間,参加契約は1年単位)
- 活動内容(2種):
- 共通活動:協調型自動運転向け情報通信プラットフォームの開発・共通化,都市交通最適化のための新たな交通サービスの実装,実証実験など共通の目標に向けた活動
- 実証実験フィールド:高蔵寺(愛知県春日井市)
- 個別活動:参加者の希望に基づいて,特定の目的のために個別に実施する活動
- 例:貴社製品との連携機能の開発,貴社が関わる外部実証実験への協力,貴社自社の技術者の育成など
- 研究テーマ候補(「参加組織の希望」や「外部資金獲得状況」に合わせて取捨選択や規模の伸縮は行います)
- 自動運転システムとの連携
- End-to-End AI と DM2.0PFとの間の情報連携・共通化
- 車載センサとインフラセンサのフュージョン
- 広域の走行計画に合わせた高精度道路地図の動的読み込み,など
- 車載/エッジ/クラウド間通信
- DM2.0PFの通信のQUIC化 (MultiPath QUICを含む)
- 車両位置に応じたエッジ・通信経路の動的選択(シミュレーション評価 と 実車評価)
- 仮名IDの有用性検証・仮名ID変更戦略による効果検証(シミュレーション評価から実車評価へ)など
- 交通サービスへの応用
- 駐車場での自動バレーパーキング(より広い駐車場での実証実験)
- ロードプライシング(バス専用レーン走行課金に限らず,より一般的なケースへ)
- DM2.0PF使用料や交通サービス利用料などの支払いのためのマイクロペイメント機能
- 蓄積した実験データ(センサデータ,軌跡データ等)の管理や活用に関する研究,など
- 自動運転システムとの連携
- 参加組織へコンソ活動の最新情報を共有するための会議体
- 運営委員会(月1回開催予定,オンライン参加可能)
- 当該分野の最新動向や,共同研究員が取り組んでいる先進的課題について情報共有します
- 週例ミーティングに参加していない方にも話題がわかるように情報を整理します
- コンソ運営に関する相談事が出される場合もあるので,オブザーバも可能な限り出席を
- 週例ミーティング(週1回開催予定,オンライン参加可能)
- 共同研究員が実施している作業進捗を細粒度で共有します
- 生の進行状況がそのまま共有されます(反面,運営委員会よりは情報が整理されていない場合も)
- オブザーバの出席は任意です
- 運営委員会(月1回開催予定,オンライン参加可能)
- 個別活動は参加組織の希望に基づいて,特定目的のために個別に実施する活動です
- 具体例
- 「ある地域の実証実験に参加しており,実証フィールドへDM2.0PFを導入したい.実験に必要な追加機能をコンソで一緒に開発したい」
- 自社製品とDM2.0PFを連携させる機能など
- 「会社としてDM2.0PFをベースに製品を作りたい.コンソで共同開発したい」
- 「インフラセンサや無線機器などを,コンソの実証フィールドで使ってデータを収集したい」
- 「自社の社員にインフラ協調型システムの開発に必要なスキルを大学で身につけさせたい」
- 「ある地域の実証実験に参加しており,実証フィールドへDM2.0PFを導入したい.実験に必要な追加機能をコンソで一緒に開発したい」
- 個別活動の実施には内容に応じて「研究費」または「共同研究員の派遣」が必要になる場合があります
共通活動について:
コンソに参加するにはオブザーバ参加費が必要です.さらにコンソ内で個別活動を希望される場合は,追加の研究費の提供や研究員の派遣をご検討ください.
- 企業の場合
- オブザーバ参加費(企業):100万円(直接経費+間接経費の合計額)
- 月1回の運営委員会,週1回の共同研究員の作業進捗を確認するミーティングに参加可能
- コンソでの個別活動を希望する場合: 追加の活動に必要な「研究費」または「共同研究員の派遣」
- 参加組織の希望に基づいて,特定目的のために個別に実施する活動になります
- 追加の「個別活動」に必要な研究費の額については別途ご相談ください.また,この部分で発生した成果物をオープンソース化に含めるかについても個別相談となります.
- 共同研究員を名古屋大学に常駐させる場合,「共同研究員に係る研究料」×消費税がかかります.
- 共同研究員に係る研究料(一人あたり): 6ヶ月超:40万円,6ヶ月以内:20万円
- オブザーバ参加費(企業):100万円(直接経費+間接経費の合計額)
- 非営利組織の場合
- オブザーバ参加費(非営利組織): 9万円 (間接経費のみ)
- 月1回の運営委員会,週1回の共同研究員の作業進捗を確認するミーティングに参加可能
- 名古屋大学の制度改訂により,直接コスト(直接経費+知の価値分)が30万円以下の場合は,間接経費が一律9万円となりました.※個別相談で減額にできる場合があります.
- オブザーバ参加費(非営利組織): 9万円 (間接経費のみ)
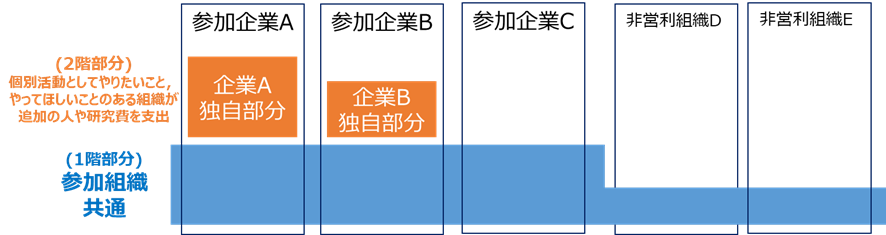
図 3 コンソ参加の枠組み
さらに詳細な共同研究の手続きフローは,こちらをご参照ください.
名古屋大学「産学官連携制度 / 共同研究」 https://jigyoka.aip.nagoya-u.ac.jp/contents/1068.html
2025.10.24開催 先進モビリティサービスのための情報通信プラットフォームに関するコンソーシアム成果報告会においてコンソーシアム設立の説明を行いました
2025成果報告会(YouTubeのページに移動します)
資料pdfはこちら
- オープンソースソフトウェア「ダイナミックマップ2.0プラットフォーム」(2026年5月15日公開) ※外部サイトへ移動します
連絡先
本コンソーシアムの活動内容に関するご質問や参加についてのご相談などは下記の宛先までご連絡ください
CAV-DM2コンソ事務局 E-Mail:cav-dm2-conso-sec:::nces.i.nagoya-u.ac.jp
(::: を @ に変えてください)