先進モビリティサービスのための
情報通信プラットフォームに関するコンソーシアム
本プロジェクトは2026年3月に終了しました。2026年4月から後継のプロジェクトとして「協調型自動運転のための情報通信プラットフォーム共通化コンソーシアム」を開始しております。
2025.10.24 成果報告会を開催しました。 詳細はこちら
2026.04.01 現在のグルッポふじとう駐車場の様子を掲載しました。 詳細はこちら
近年,自動運転システムや高度安全運転支援システムの開発・普及が進んだことにより,高精度なセンサと通信装置を積んだ車両が街中を走行することが多くなってきています.しかし,単独のセンサではカバーできる範囲に限りがあり,さらに街中にはセンサを遮る障害物も多いため,車両単体で観測できる領域は十分広いとは言えません.そこで更なる交通安全の実現には,車両同士や道路インフラ装置との間で通信を行って,複数のセンサの情報を交換・共有することで,認識できる範囲をお互いに拡張することが重要になってきています.
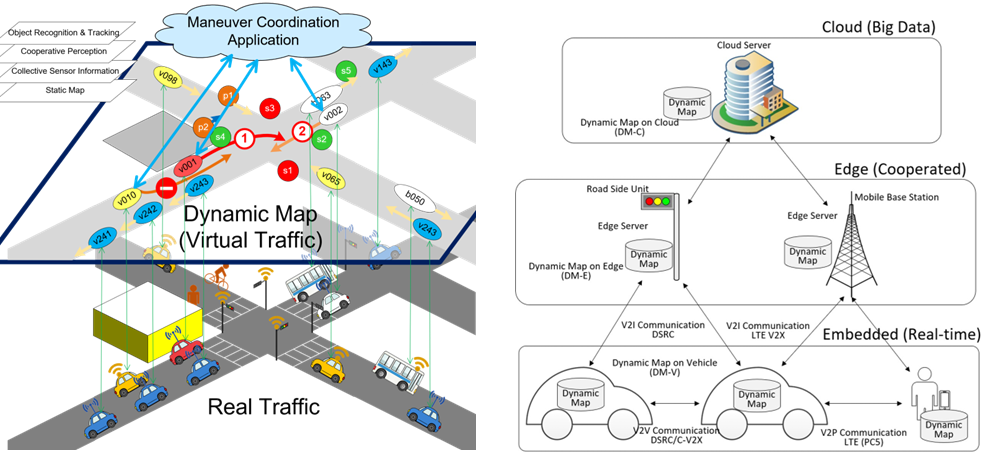
センサが検知し,通信によって共有された情報は,まだ単独では交通ルール上の意味が与えられていません.高精度道路地図や信号情報などの他の情報と組み合わせて理解することで,はじめて物体と車線や物体同士の交通ルール上の関係を解釈できるようになります.センサなどの情報を高精度道路地図上で意味付けして検索・統合利用できるようにしたシステムは,「ダイナミックマップ」と呼ばれています.ダイナミックマップは,自動運転等の高度な交通サービスを支える上で必要な情報基盤と位置づけられており,日本国内では内閣府の戦略的イノベーション創造プログラム・自動走行システム(SIP-adus)のプロジェクト内で重点分野の1つとして扱われています.世界的にも,NDS,ADASIS,TISA,SENSORISなどの業界団体が連携して,通信で共有されたセンサなどの情報と高精度道路地図を扱う仕組みが検討されています.
名古屋大学と同志社大学は,2016年から,複数の企業・非営利組織で構成されたコンソーシアム型の共同研究組織を立ち上げ,ダイナミックマップの研究開発を続けてきました(DM2.0コンソ[2016.9-2020.3],DM2.0高信頼化コンソ[2020.4-2023.3]).我々のソフトウェア成果物である「ダイナミックマップ2.0プラットフォーム(DM2.0PF)」は,車載システムやスマートフォン等の組込み環境,道路インフラ装置・通信基地局などのエッジ環境,データセンターのクラウド環境の,三階層にまたがった通信連携を行う分散データベースシステムとして実現されました.さらにDM2.0PFの信頼性評価や長期運用ノウハウの獲得を目的として,愛知県春日井市高蔵寺を対象地域としたオープンダイナミックマップ実証実験も実施してきました.
これまではダイナミックマップ技術と運用の基礎の確立を中心として研究開発と実証実験を進めてきました.技術的な課題の解決は継続して取り組みますが,研究段階としては自動運転サービスやMaaSなどの新しいモビリティサービスの社会実装の展開に合わせて,情報通信プラットフォームとしての貢献度を大きく示していく時期に入ったと考えております.そこでダイナミックマップ単独よりも広い視点から,モビリティサービスを支援する技術の研究と実証が必要と考え,新たな共同研究組織「先進モビリティサービスのための情報通信プラットフォームに関するコンソーシアム」[2023.4-2026.3予定]を立ち上げました.本コンソーシアムの目標は次の2つです.
① ダイナミックマップの研究成果をベースに,先進モビリティサービスのための情報通信の挑戦的課題に取り組み,国内外の研究を先導する.
基礎研究テーマ
- 地理的情報に基づく複数通信方式 (携帯電話網/ITS無線/WiFi) の活用
- 確率的な環境情報・予測情報の扱いと活用
- セキュリティ・プライバシー保護…など
基礎研究テーマは参加組織の要望に合わせて変更する可能性がございます.
② 実証実験を通じて研究成果の有用性を示すとともに,レベル4以上の自動運転サービスの社会実装に寄与する.
実証実験テーマ
- 名古屋大学外の自動運転プロジェクトとの連携
- レベル4自動運転の社会実装にダイナミックマップが寄与することの立証
- スマートシティの情報基盤としての活用
- DM2.0PFのソースコードの品質確保…など
実証実験テーマの一環として,経済産業省「自動運転レベル4等先進モビリティサービス研究開発・社会実装プロジェクト テーマ4:混在空間でレベル4を展開するためのインフラ協調や車車間・歩車間の連携などの取組」に参画いたします.
コンソーシアムの時期は[2023.4-2026.3]を予定しております.
現在,参加組織を募集しております.開始後の途中参加も可能です(要相談).
- 募集資料
- お問い合わせ先: admobi-dm2-conso-sec:::nces.i.nagoya-u.ac.jp
(:::
を @ に変えてください) ※参加に関するご相談はこちらにお願いいたします.
コンソーシアム研究参加の意義
先進モビリティサービス向けの情報通信プラットフォームはまだ新しい領域であり,その研究開発と実証実験には,情報・通信・交通・車両・法律などの様々な分野の専門家の意見が必要です.また,車両や路側機,スマホ,クラウドなどの複数の機器が連携しなければ実現できないことからも,単独の組織で実施することは難しいでしょう.自組織の長所を活かし,足りないところは他組織の専門家に自由な意見をもらいながら集まってソフトウェアを開発する,という研究開発スタイルが,大学を拠点とした本コンソーシアムでは可能です.
研究参加のメリットについて(一部)
- コンソ参加期間中の開発成果は,すべて自組織に持ち帰って無償で利用できます
- ただし,過去のコンソの開発成果に依存するものについては扱いが別になります
- オブザーバは開発成果を持ち帰ることはできません
- コンソ参加期間中の開発成果が有償ライセンスされた場合は,開発成果の所有率に応じて配分を受けることができます
- 運営委員会が月に1回ペースで開催され,当該分野の最新動向や,常駐研究員が現在進行形で取り組んでいる先進的課題について情報共有されます
- 運営委員会への出席は,研究参加・オブザーバ参加のどちらでも可能ですが,審議に加わることができるのは研究参加の組織のみです
参加大学
国立大学法人東海国立大学機構 名古屋大学
高田 広章 教授 (名古屋大学 未来社会創造機構)
石川 佳治 教授 (名古屋大学大学院 情報学研究科)
村瀬 勉 教授 (名古屋大学 情報基盤センター)
河口 信夫 教授 (名古屋大学 未来社会創造機構)
尾崎 信之 教授 (名古屋大学 未来社会創造機構)
森川 高行 特任教授 (名古屋大学 未来社会創造機構)
二宮 芳樹 特任教授 (名古屋大学 未来社会創造機構)
金森 亮 特任教授 (名古屋大学 未来社会創造機構)
山本 雅基 特任教授 (名古屋大学大学院 情報学研究科)
渡辺 陽介 特任准教授 (名古屋大学 未来社会創造機構)
赤木 康宏 特任准教授 (名古屋大学 未来社会創造機構)
塚田 学 特任准教授 (名古屋大学大学院 情報学研究科、東京大学大学院 情報理工学系研究科)
山田 峻也 助教 (名古屋大学大学院 情報学研究科)
石原 進 招へい教員 (名古屋大学 未来社会創造機構、静岡大学 学術院工学領域 工学部数理システム工学科 教授)
中條 覚 招へい教員 (名古屋大学 未来社会創造機構、株式会社三菱総合研究所)
Ehsan Javanmardi 招へい教員 (名古屋大学大学院 情報学研究科、東京大学大学院 情報理工学系研究科 特任助教)
草山 真一 研究員 (名古屋大学 未来社会創造機構)
川田 福和 研究員 (名古屋大学 未来社会創造機構)
竹内 僚祐 研究員 (名古屋大学 未来社会創造機構)
小松 直登 研究員 (名古屋大学 未来社会創造機構)
学校法人同志社 同志社大学
佐藤 健哉 教授 (同志社大学 モビリティ研究センター)
ALPARSLAN ONUR 特任教授 (同志社大学 モビリティ研究センター)
参加企業
キヤノンITソリューションズ株式会社(~2024年度)
富士ソフト株式会社
オブザーバ
公益財団法人京都高度技術研究所
株式会社NTTデータMSE
ソフトバンク株式会社
日本信号株式会社
三菱電機株式会社
春日井市
論文誌
- Lu Tao, Yousuke Watanabe, Ryosuke Takeuchi, Shinichi Kusayama, Shunya Yamada, Hiroaki Takada, "Enhancing Autonomous Vehicles' Situational Awareness with Dynamic Maps: Cooperative Prediction on Edge, Cloud and Vehicle", IEEE Transactions on Intelligent Vehicles, Volume: 10, Issue: 6, pp.3755-3767, June 2025. DOI: 10.1109/TIV.2024.3462744
- Lu Tao, Yousuke Watanabe, Hiroaki Takada, "Geo-Spatial and Temporal Relation Driven Vehicle Motion Prediction: A Geographic Perspective", IEEE Transactions on Intelligent Vehicles, pp.1-12, May 30, 2024. DOI: 10.1109/TIV.2024.3407210
- Rui Teng, Kenya Sato, "A Fundamental Study of Reliable Vehicle-to-Cloud Communication Using Multiple Paths with Redundancy Mitigation", Applied Sciences, Vol.14, No.7, Article-number 2841, March 2024.
国際会議特別セッション
- Rationale and validation of cooperative perception services for connected & automated vehicles,30th ITS World Congress, September 2024.
Session Organizer: Kenya Sato, Doshisha University, Japan
国内会議
- 平野学宜,山田峻也,渡辺陽介,高田広章,「路車協調情報を活用した物体検出モデルのための自動教師データ生成手法」第256回ARC・第211回SLDM・第71回EMB合同研究発表会(ETNET2026),2026年3月.
- 小松直登,山田峻也,渡辺陽介,佐藤健哉,高田広章,「自動バレーパーキングにおける引き返しコストを考慮した経路生成手法」電子情報通信学会 ITS研究会,2026年2月.
- 竹内僚祐,渡辺陽介,山田峻也,佐藤健哉,高田広章,「V2I認証高速化のための走行位置に応じたV2N経由証明書連携手法」電子情報通信学会 ITS研究会,2026年2月.
- 川田福和, 山田峻也,渡辺陽介,佐藤健哉,高田広章,「フリースペース情報を活用した路車協調型自動運転の円滑性調査」電子情報通信学会 ITS研究会,2026年2月.
- 川田福和,山田峻也,渡辺陽介,佐藤健哉,高田広章,「複数路側機による測位精度向上のための観測誤差モデルの検討」第23回ITSシンポジウム2025,2025年12月.
- 岸田宏翼,渡辺陽介,山田峻也,佐藤健哉,高田広章,「自動運転車のための高精度道路地図の動的読み出し機構の試作」第23回ITSシンポジウム2025,2025年12月.
- 小林玄武,山田峻也,渡辺陽介,黒原知秋,高田広章,「バス専用レーン走行課金システムのシミュレーション評価」 電子情報通信学会 ITS研究会, 2025年9月.
- 羽多野開斗,山田峻也,渡辺陽介,高田広章,「自動車の通過方向の傾向に着目した交差点点群データのクラスタリング手法」 第43回日本ロボット学会学術講演会(RSJ2025), 2025年9月.
- 長尾栞汰,山田峻也,渡辺陽介,高田広章,「センサデータ類似度に基づく車両搭乗状態の判定システム」 第43回日本ロボット学会学術講演会(RSJ2025), 2025年9月.
- 山田峻也,丈達生伍,渡辺陽介,佐藤健哉,高田広章,「協調型路側機のフリースペース検知手法の実環境評価:直接検知手法と間接検知手法の比較」 センサネットワークとモバイルインテリジェンス研究専門委員会5月研究会,2025年5月.
- 山田峻也,「路車協調の可能性:高蔵寺ニュータウンでの実証事例」 情報処理学会 東海支部 支部事業主催講演会,2025年1月.
- 川田福和,丈達生伍,山田峻也,渡辺陽介,佐藤健哉,高田広章,「協調型自動運転に向けた複数路側機の認識情報融合による計測精度の向上」 第22回 ITSシンポジウム2024,2024年12月.
- 山田峻也,赤木康宏,渡辺陽介,佐藤健哉,高田広章,「住宅密集地における信号あり・信号なし交差点での路車協調効果, 〜高蔵寺ニュータウンでの検証〜」 第22回 ITSシンポジウム2024,2024年12月.
- 郭徳端,陶璐,山田峻也,渡辺陽介,高田広章,「信号を考慮したディープラーニングによる車両軌跡予測」 第67回自動制御連合講演会,2024年11月.
- 安江優一郎,渡辺陽介,山田峻也,高田広章,高精度道路地図に基づく分散KVS上での点群管理手法,WebDB夏のワークショップ2024,2024年9月.
- 西原 匠寅,山田峻也,渡辺陽介,高田広章,複数のLiDARからの連続的な物体検知情報を扱うマルチフレームデータアソシエーション手法,第42回日本ロボット学会学術講演会 (RSJ2024),2024年9月.
- 横井健人,丈達生伍,山田峻也,渡辺陽介,佐藤健哉,高田広章,
「自動バレーパーキングに向けた駐車スペースの満空状態確率に基づく経路生成手法」
第21回ITSシンポジウム2023,2023年12月.
- 川田福和,丈達生伍,山田峻也,渡辺陽介,佐藤健哉,高田広章,
「路車協調に向けた物標位置情報提供のためのデータフュージョンシステム」
第66回自動制御連合講演会,2023年10月.
- 大畑幸志郎,渡辺陽介,山田峻也,高田広章,
「高精度道路地図を用いた走行予定経路に基づく競合可能性の検索」
第177回DBS・第152回IFAT合同研究発表会,2023年9月.
- 丈達生伍,山田峻也,渡辺陽介,佐藤健哉,高田広章,
「LiDARを用いたレイトレースによる車庫状態推定手法」
第41回日本ロボット学会学術講演会(RSJ2023),2023年9月.
展示会
- あいちITSワールド2025,ポートメッセなごや,2025年11月.
- EdgeTech+ 2025,パシフィコ横浜,2025年11月.
- EdgeTech+ 2024,パシフィコ横浜,2024年11月.
- EdgeTech+ 2023,パシフィコ横浜,2023年11月.
連絡先
本コンソーシアムの活動内容に関するご質問や参加についてのご相談などは下記の宛先までご連絡ください
AdMobi-DM2コンソ事務局 E-Mail:admobi-dm2-conso-sec:::nces.i.nagoya-u.ac.jp
(::: を @ に変えてください)