グルッポふじとう駐車場 空き状況のご案内
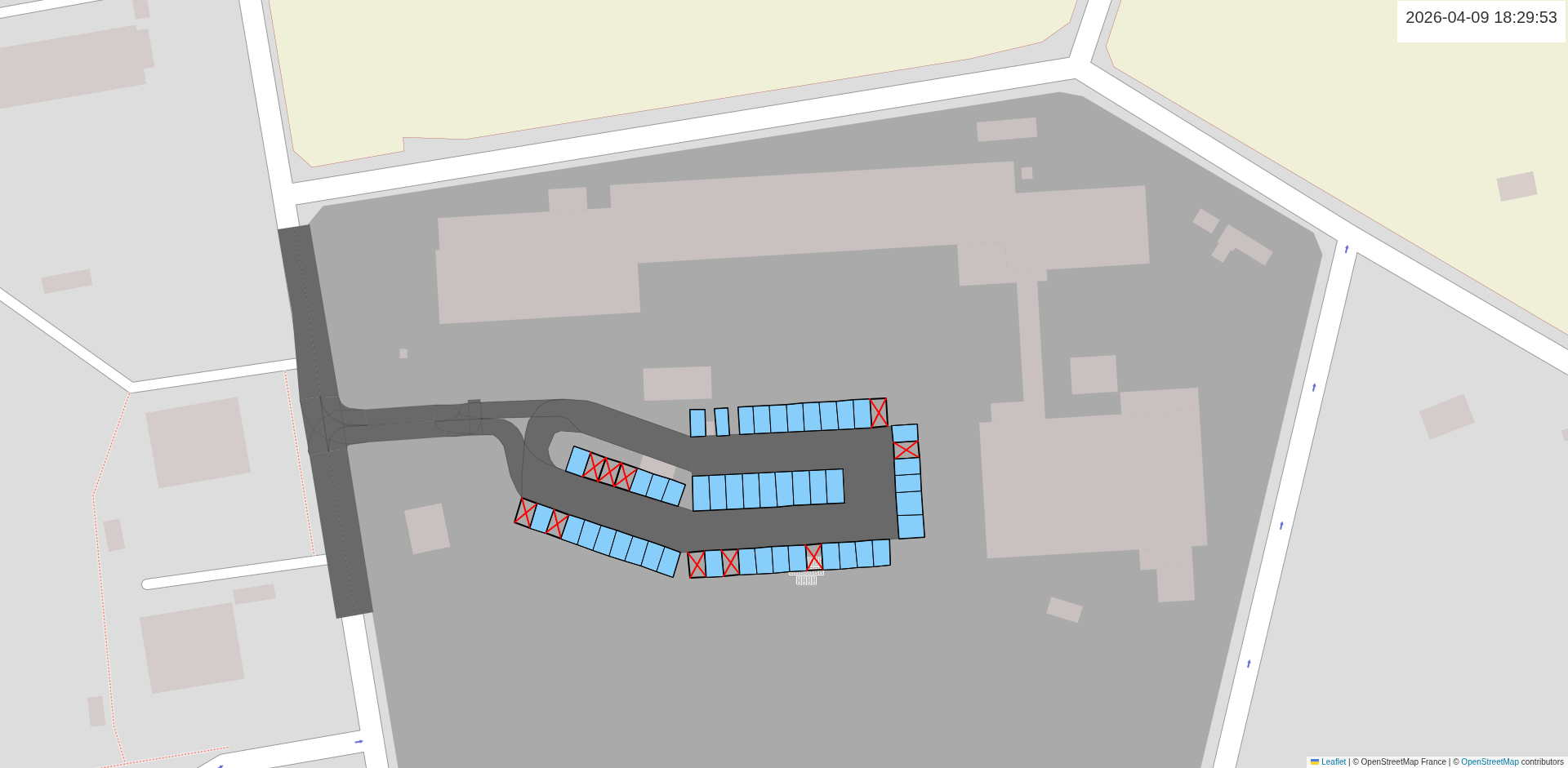
グルッポふじとう駐車場の様子
本ページでは、グルッポふじとう駐車場の現在の満空状況を表示しています。
現地に設置したLiDARセンサにより各駐車区画の利用状況を検知し、駐車スペースごとの満空情報を自動的に算出しています。
【ご利用にあたっての注意】
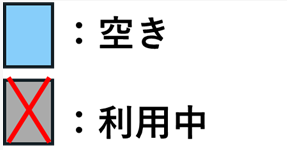
- 本システムに設置しているLiDARセンサは約5年間連続稼働しており、経年劣化の影響により一部の領域で検知性能が低下しています。そのため、実際には空車であっても「利用中」と表示される場合があります。
- システムトラブル等により、満空情報が更新されていない場合があります。図の右上に表示されている時刻が、満空情報を出力した時刻ですので、ご利用の際は必ずご確認ください。
- 危険ですので、運転中にスマートフォン等で本ページを閲覧・利用することは絶対におやめください。
概要
本システムは、名古屋大学と愛知県春日井市が連携して実施している「高蔵寺スマートシティ推進検討会」の活動の一環として構築したものです。
その後、名古屋大学大学院情報学研究科附属組込みシステム研究センターにおいて、
本フィールドを活用した研究開発を進め、その成果の一部を公開しています。
グルッポふじとう駐車場に3台のLiDARセンサを設置し、
駐車スペースごとの占有状況を自動判定することで、
利用者への満空情報提供および駐車場管理の高度化を目指しています。
LiDAR(Light Detection and Ranging)は、
レーザ光を用いて対象物までの距離を計測するセンサ技術であり、
自動運転車などにも活用されています。
本システムではカメラを使用していないため、
個人を特定できる画像情報を取得することなく、
駐車スペースの利用状況を把握できます。
また、LiDARは周囲の明るさの影響を受けにくいため、昼夜を問わず安定した検知が可能です。
詳細は次の動画をご覧ください。
実績
- 先進的技術やデータを活用したスマートシティの実証調査(その7),調査報告書.
- S. Yamada, et al. "Estimation method of parking space conditions using multiple 3D-LiDARs.", International Journal of Intelligent Transportation Systems Research 20(2), pp. 422-432, 2022.
- 横井健人,丈達生伍,山田峻也,渡辺陽介,佐藤健哉,高田広章, "自動バレーパーキングに向けた駐車スペースの満空状態確率に基づく経路生成手法", 第21回ITSシンポジウム2023,2023年12月.
- 小松直登, 山田峻也, 渡辺陽介, 佐藤健哉,高田広章 "自動バレーパーキングにおける引き返しコストを考慮した経路生成手法", 信学技報, vol. 125, no. 355, ITS2025-67, pp. 159-164, 2026年2月.
関係機関
連絡先
本プロジェクトに関するお問い合わせは,
下記までご連絡ください。
AdMobi-DM2コンソ事務局 E-Mail:admobi-dm2-conso-sec:::nces.i.nagoya-u.ac.jp (::: を @ に変えてください)